手机版

围绕刚才的众包数据分类,目前国内外出现了不同方案的众包公司,这些初创企业都做得非常不错,主要有两大方案,第一是以视觉为主,比如有Mobileeye、IvI5以及国内的宽带科技等企业。以IvI5为例,左上角是IvI5的制图样例,制作视频APP应用,向目标锁定到Uber等平台的司机用户上,使用者可以将手机固定在汽车仪表盘上方,下载该应用并在驾驶室的启动,会开始录制视频,同时收集加速度GPS数据,驾驶员每驾驶十英里大概可得到几美分报酬,这些数据最终将帮助IvI5团队创建高精地图。
另一种方案是以雷达为主,比如DeepMap和Civil Map等公司,主要是将激光雷达获取的点云数据利用AI识别道路特征,把道路边线、车道线以及一些看板的特征识别出来,建立起地图更新或直接构建感知图层。由于激光雷达价格远高视觉传感器,所以它在数据规模上是不及以视觉为主的传感器的规模,但它精度更高,因此这两种方案各有利弊。目前如果能把这两个方案融合在一起进行取长补短,可能会是比较好的方案。

这张表展示了对激光和视觉两大主流众包方案的比较。激光为主的方案有成本高、精度高的特点,核心传感器是不同线数的激光雷达,众包数据源包括激光点云数据或者一些数据照片等数据,核心处理算法包括三维建模、计算机视觉等方面,输出成果有三维模型、车道模型和地面相关要素。在以视觉为主的方案中,成本低,精度也相对低,核心传感器有全景相机、单目相机、双目相机等,甚至手机相机和行驶记录仪都有可能作为它的输入,它的众包数据源是照片、视频、轨迹数据,核心算法包括多视几何、深度学习、多元语义分割等,输出成果具有高精度的拓扑关系及能识别出的交通标志牌。
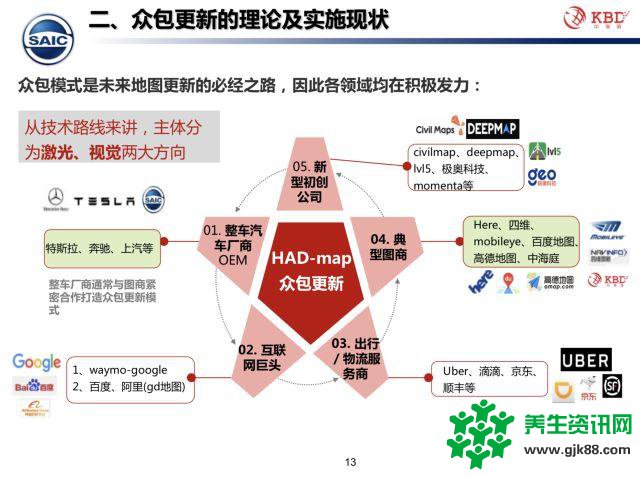
实际上,众包是未来地图更新的必经之路,所以在各个领域都有不同的厂商在发力。从技术路径上讲,有激光和视觉两大方向。第一,有很多整车厂以及OEM厂商已经开始在做;第二,互联网巨头如Google、百度、阿里已经在关注并开始发力;第三,很多出行和物流服务商也在做,Uber、滴滴、京东等;第四,典型的图商,如here、四维、百度、高德,包括我们在内及新型初创公司,大量的新初创的技术,都贡献不少,包括civilmap、deepmap、lvl5等等。
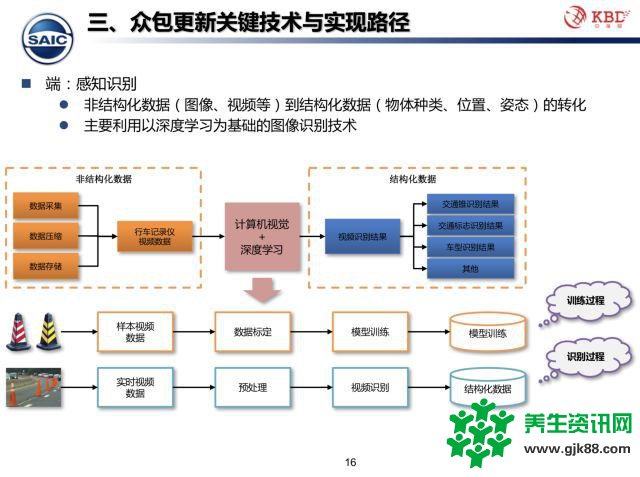
我们来看一下众包更新的关键技术和实现路径。我们认为基于端、管、云构建的数据生态系统,终端主要是传感器、本地的计算能力以及高精度定位。通讯主要是管,负责数据传输和信息安全;云端需要有AI大数据处理、地图生成和构建。高精地图的众包主要是分为两个部分:智能感知终端,即端的感知能力,还有高精度地图云,在云端做高精度的融合和更新处理。

在终端层面上会有哪些工作呢?这幅图主要展示了汽车所能应用的绝大部分传感器,激光雷达、差分GPS、惯性导航、一些其他的传感器,包括路侧单元传感器、身体生理传感器(如检测疲劳驾驶)及温度、湿度、风向传感器等,这些传感器能完整地获取人体以及车辆的自身状态,不仅可以挖掘自车状态的数据,也能用于自动驾驶,还是未来动态地图众包更新的一个来源。比如通过测量车辆雨刮的使用状况以及频率,能够间接了解该区域天气情况。在终端方面,我们的主要任务首先是高精度的融合定位,如果我们需要轨迹数据,那么我们希望这个轨迹数据至少是分米级的定位精度,通过差分GPS和惯导能够获得一些位置,再通过融合定位的方式,去生成精准的轨迹。
传感器除了获取轨迹数据和相关的车辆数据之外,算力也非常重要。它要将传感器所获得的数据进行计算或识别成我们通过众包云端能够使用的一些语义地图,传感器实时产生的数据量非常大,在现在的通讯状况下,把这些数据传给云端,通讯压力很大,同时大量的数据在云端将会被浪费。因此终端需要一定的计算能力进行初步的数据对齐和处理,例如感知特征识别和地图要素矢量化,这些处理需要同步传感器的时间以及合理的调度和优化资源。目前世界上比较好的终端开发平台是NVIDIA的Jetson TX2,搭载代号Parker的Tegra处理器、6核CPU架构、256核Pascal架构GPU核心,整体模块功耗低于7.5W。
 闭经40载险丧命,竟是因为这个病
闭经40载险丧命,竟是因为这个病  体重270斤姑娘肚里长了排球大的肿瘤,医生有点犯难
体重270斤姑娘肚里长了排球大的肿瘤,医生有点犯难  13岁女孩长了卵巢畸胎瘤,一查妈妈也得过这个病
13岁女孩长了卵巢畸胎瘤,一查妈妈也得过这个病  12岁男孩坚持“吸母乳”,每天3次不给就发火 孩子什
12岁男孩坚持“吸母乳”,每天3次不给就发火 孩子什  染发真的会致癌吗?染发要注意哪些事项
染发真的会致癌吗?染发要注意哪些事项  Angelababy冲浪秀大好身材 怎么拥有好身材
Angelababy冲浪秀大好身材 怎么拥有好身材  女德班称戴美瞳女生不正经 劣质彩色隐形眼睛有致失
女德班称戴美瞳女生不正经 劣质彩色隐形眼睛有致失  家暴不是家务事 女人如何预防和应对家暴
家暴不是家务事 女人如何预防和应对家暴  从0.79千克到3.3千克:山西“巴掌婴儿”出院
从0.79千克到3.3千克:山西“巴掌婴儿”出院  严守这10条 能够帮你预防70%的育儿错误
严守这10条 能够帮你预防70%的育儿错误  娃大喊大叫容易伤“声” 做好“11条”防嗓音疾
娃大喊大叫容易伤“声” 做好“11条”防嗓音疾  提升哺乳期妈妈营养健康,重在“均衡”
提升哺乳期妈妈营养健康,重在“均衡”  春季小儿养护肝脏正当时
春季小儿养护肝脏正当时  研究表明安慰剂能缓解儿童咳嗽
研究表明安慰剂能缓解儿童咳嗽  啪啪啪能够缓解痛经,这事靠谱吗?
啪啪啪能够缓解痛经,这事靠谱吗?  壮阳药物不是人人能用
壮阳药物不是人人能用  白露开始不要露,常搓耳朵多吃梨!
白露开始不要露,常搓耳朵多吃梨!  立冬应知道的养生知识
立冬应知道的养生知识  冬季进补 需要辨清自身体质
冬季进补 需要辨清自身体质  中医养生推荐四款补肾御寒食疗方
中医养生推荐四款补肾御寒食疗方  冬季养生 怎么预防脑血管病(中风)
冬季养生 怎么预防脑血管病(中风)  夏至过后肠胃多虚弱 应多吃清热利湿食物
夏至过后肠胃多虚弱 应多吃清热利湿食物