手机版

终端最开始核心是定位,还需要感知识别,它首先需要图像数据的感知,最好的方法是利用AI深度学习的处理方法,实质就是将非结构化图像数据转化为结构化数据,包括识别的特征、物体的种类、位置和姿态等等。非结构化数据,比如行车记录仪的视频数据,包括数据采集、数据压缩和数据存储;而最终的结构化数据,包括了初步识别的结果,如交通标志的识别结果、车道线等。
对于转化的过程,都是深度学习来做的。我们所需要样本的训练过程以及针对性的样本模型,相信大家都比较熟悉这些工作了,我就不展开讲了。
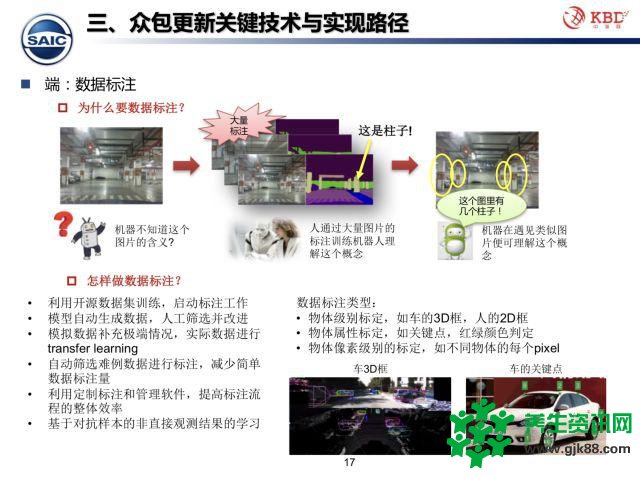
这里也简单地说明一下,在做深度学习时,首先需要标注,需要一些标注的数据来进行最后的推理和使用。这些标注的工作是由大量的人工和半自动化的方式来实现的,有的可以利用开源的数据集来训练,也有模型能够自动地生成部分的数据,包括人工的筛选用来表示对错的一些标识。这些工作在业内也有专门的公司会帮我们来做。
同时,标注的类型我们可以分为物体级别标定、物体属性标定以及物体像素级别的标定,可以根据实际的需要来进行选择。
接下来我们看一下管端,众包数据不可能都在终端完成,因此它需要把数据传到云端,在管端主要是通讯,通讯方面我们可以看几个数据,首先是原始感知数据,如果要把原始数据全部传到云端,在高速公路经过SLAM或其他特征提取后大概是50兆/公里,如果要将非常完整的激光点云往上传,一公里大概都需要一个G的数据,而整个全国高速估计得要TB级了,因此云端是不需要这么庞大的数据的,我们只需要将矢量化的数据往上传,矢量化的数据在高速公路基本上每公里可以做到10KB的数据量。
在管端,除了通讯,还需要关注数据传输的协议。目前主要流行的协议是ADASIS协议,同时还需要关注它的信息安全,未来的5G和V2X的发展也会给通讯带来革命性的变化。
上图的下面有两幅小图,可以看到车跟车之间的通讯、车和路以及车和人之间的交互的数据,这些都会成为我们未来新众包数据的来源,可以用于实时交通信息的数据获取。
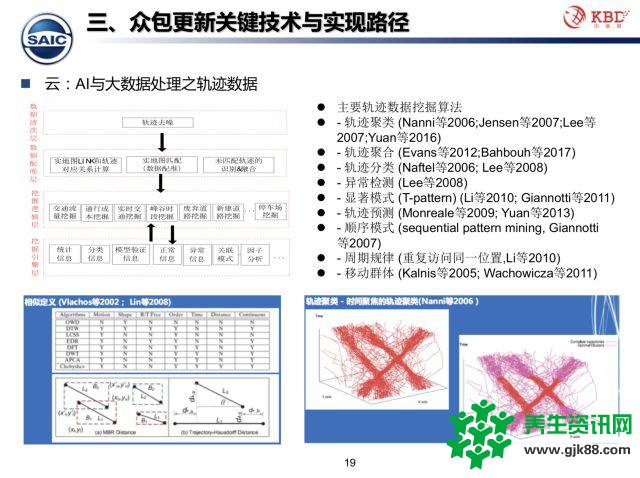
接下来我们要看看云端要。在云端,主要利用AI机器学习以及大数据处理等技术,从海量众包数据中获得有效的信息,为高精度地图的生成和构建做准备。对不同类型的众包数据,处理方法会不一样。对轨迹数据我们要遵从经典的数据挖掘的方法,包括数据清洗、配准、挖掘等过程。挖掘的算法也有很多,在左边我们也写了很多算法,大家可以去了解一下,包括相似定义算法、以时间聚焦的轨迹聚类。
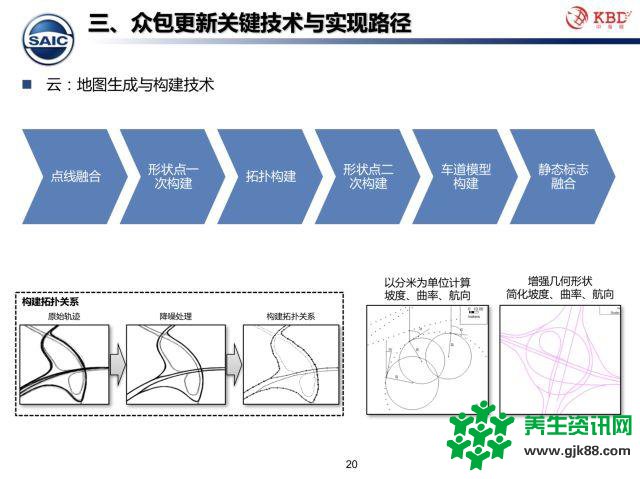
在进行机器学习和大数据清洗处理之后,就可以进行构建地图了。上图是地图生成和构建的基本流程。我们将得到识别出的道路边线的形状以及地物类的位置属性,这是我们的输入,但是这并不是我们所说的高精度地图,我们还要进行专业化的地图生成和构建,其中包括点线融合、形状点一次构建、拓扑构建,在这个基础上,再进行形状点二次构建,增强它的几何形状,使二阶更加光滑,并计算出它的坡度曲率,然后再构建出车道的模型以及静态标志融合等多个步骤。
其中拓扑构建指的是道路和车道间的连通性关系。车道模型构建中需要根据形状的信息生成高精度的坡度、曲率和ADAS数据。

 闭经40载险丧命,竟是因为这个病
闭经40载险丧命,竟是因为这个病  体重270斤姑娘肚里长了排球大的肿瘤,医生有点犯难
体重270斤姑娘肚里长了排球大的肿瘤,医生有点犯难  13岁女孩长了卵巢畸胎瘤,一查妈妈也得过这个病
13岁女孩长了卵巢畸胎瘤,一查妈妈也得过这个病  12岁男孩坚持“吸母乳”,每天3次不给就发火 孩子什
12岁男孩坚持“吸母乳”,每天3次不给就发火 孩子什  染发真的会致癌吗?染发要注意哪些事项
染发真的会致癌吗?染发要注意哪些事项  Angelababy冲浪秀大好身材 怎么拥有好身材
Angelababy冲浪秀大好身材 怎么拥有好身材  女德班称戴美瞳女生不正经 劣质彩色隐形眼睛有致失
女德班称戴美瞳女生不正经 劣质彩色隐形眼睛有致失  家暴不是家务事 女人如何预防和应对家暴
家暴不是家务事 女人如何预防和应对家暴  从0.79千克到3.3千克:山西“巴掌婴儿”出院
从0.79千克到3.3千克:山西“巴掌婴儿”出院  严守这10条 能够帮你预防70%的育儿错误
严守这10条 能够帮你预防70%的育儿错误  娃大喊大叫容易伤“声” 做好“11条”防嗓音疾
娃大喊大叫容易伤“声” 做好“11条”防嗓音疾  提升哺乳期妈妈营养健康,重在“均衡”
提升哺乳期妈妈营养健康,重在“均衡”  春季小儿养护肝脏正当时
春季小儿养护肝脏正当时  研究表明安慰剂能缓解儿童咳嗽
研究表明安慰剂能缓解儿童咳嗽  啪啪啪能够缓解痛经,这事靠谱吗?
啪啪啪能够缓解痛经,这事靠谱吗?  壮阳药物不是人人能用
壮阳药物不是人人能用  白露开始不要露,常搓耳朵多吃梨!
白露开始不要露,常搓耳朵多吃梨!  立冬应知道的养生知识
立冬应知道的养生知识  冬季进补 需要辨清自身体质
冬季进补 需要辨清自身体质  中医养生推荐四款补肾御寒食疗方
中医养生推荐四款补肾御寒食疗方  冬季养生 怎么预防脑血管病(中风)
冬季养生 怎么预防脑血管病(中风)  夏至过后肠胃多虚弱 应多吃清热利湿食物
夏至过后肠胃多虚弱 应多吃清热利湿食物